Visit Advertiser
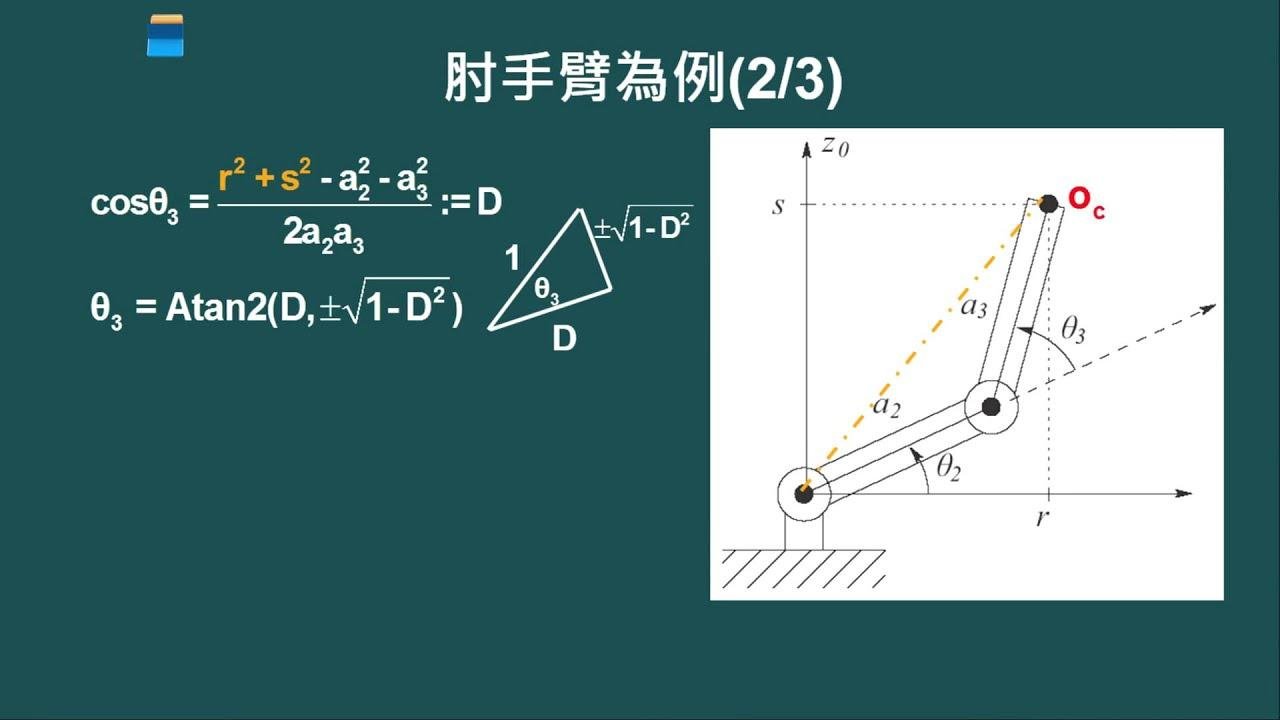
機器人學_蕭俊祥_第六單元 反向運動學_Part 3B 幾何方法求位置(2)